This was done as part of a voluntary internship at the University of Auckland from November 2020 to February 2021.
The hardware and software design was primarily based on controlling the steering motor, while receiving power from another secondary converter system
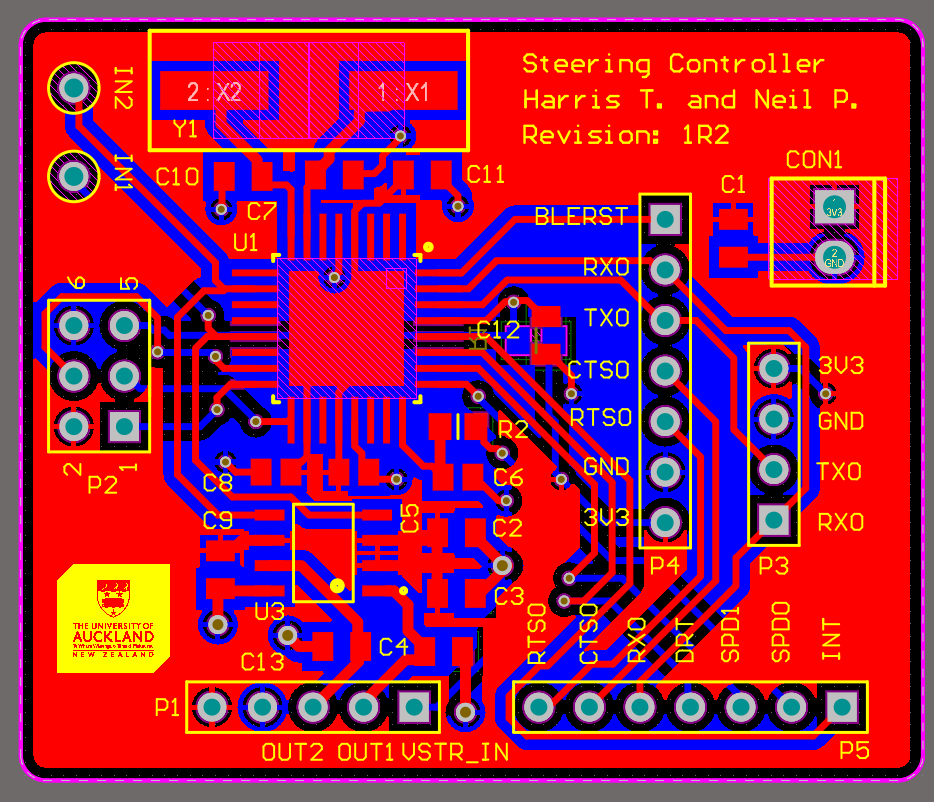
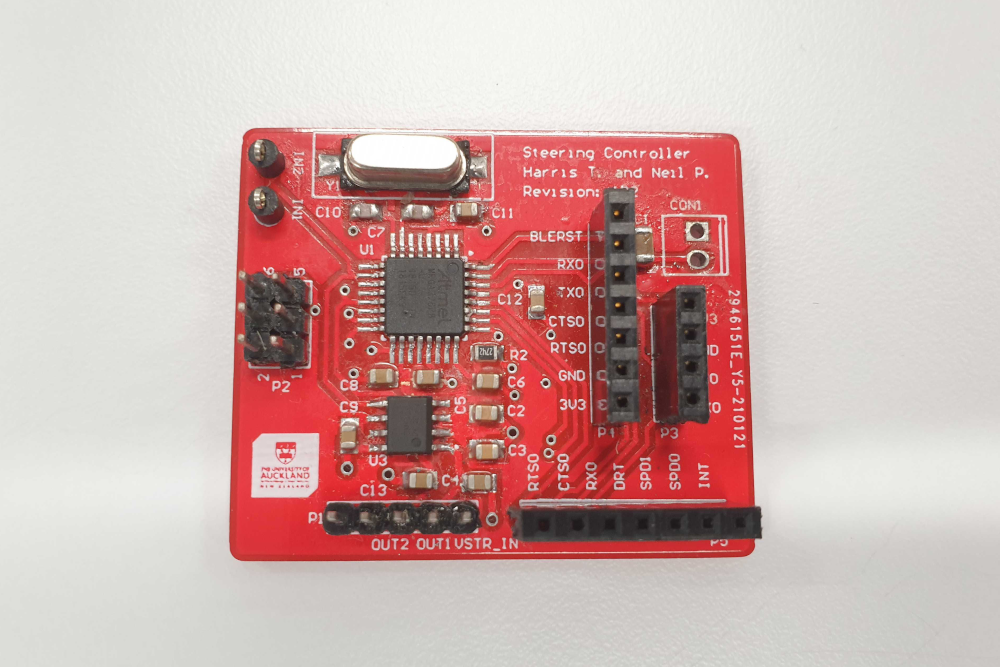
and communicating other details to another motor controller for forward/reverse control. The SMT-based PCB was designed using
Altium Designer, then assembled and tested with electronic instruments. The steering motor terminals were connected to a ZXBM5210-SP-13,
an integrated H-bridge IC.
Firmware
The C-based firmware for the Steering Controller functioned by receiving a desired steering angle from a
Remote, at which the PI controller would configure the duty cycle of the PWM for the steering motor based on the difference
in error between current angle and desired angle. The firmware was developed for an ATmega328PB and the communication with
the Remote was done through UART via a BLE112 Bluetooth module.